⚠️ ARCHIVE NOTICE ⚠️
This documentation is no longer being maintained!
- The new ArduSub docs are located in the ArduPilot wiki. Updated pages will be redirected.
- The Companion Computer Software is also archived, and has been replaced by BlueOS.
- For Control Station Software, see QGroundControl or Cockpit (our new alternative).
Git
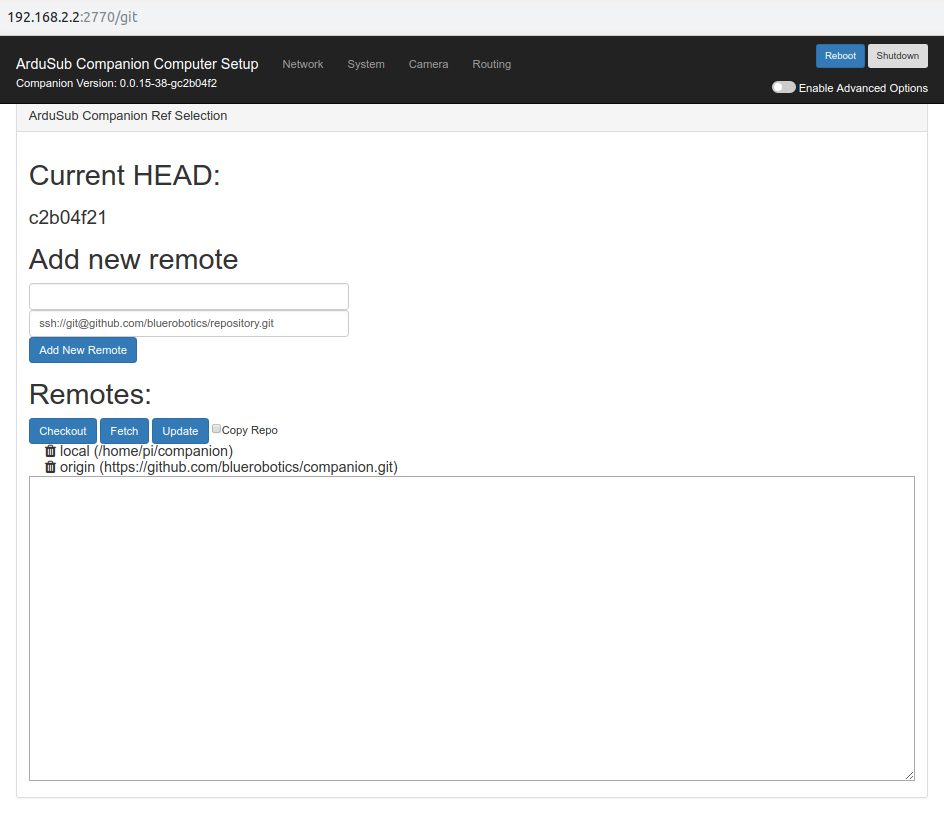
Git page is used for:
- Displaying the current head
- Adding remote repositories
- Updating the system to development branches
Manual updates
This feature is for development and testing only. It can result in unstable behavior or an unusable system. You should only use this if directed during technical support or beta testing.
Before continuing, make sure that you have internet access.
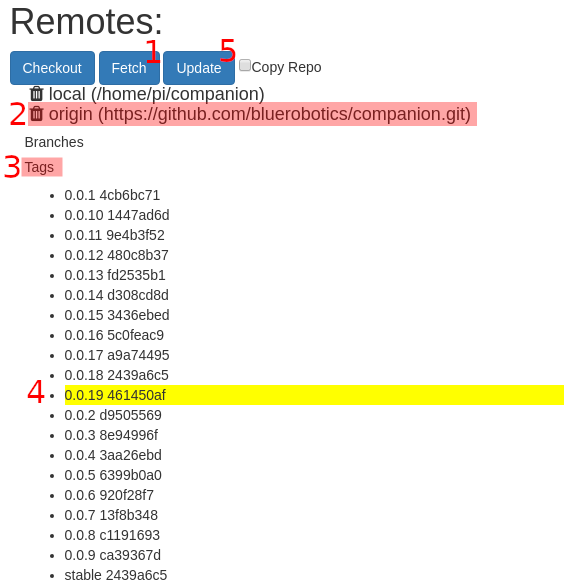
Steps to manually update via the Git page:
- Click in Fetch to get the last changes of the remote repositories.
- Select the desired remote, origin for Blue Robotics repository.
- Click in tags to open the available options.
- Select the tag that you want to update, it'll be highlighted when selected.
- Click in Update to update companion to the selected version.